This post suggests some strategies for teaching vectors to 14-16 olds. In part 1 we looked at the idea of combining two vectors into one; that is to say, finding the resultant vector. In this part, we’re going to look at the inverse operation: splitting a single vector into two component vectors.
We’re going to use scale drawing rather than trigonometry since (a) this often leads to a more secure understanding; and (b) it is the expected method in the UK curriculum for 14-16 year olds.
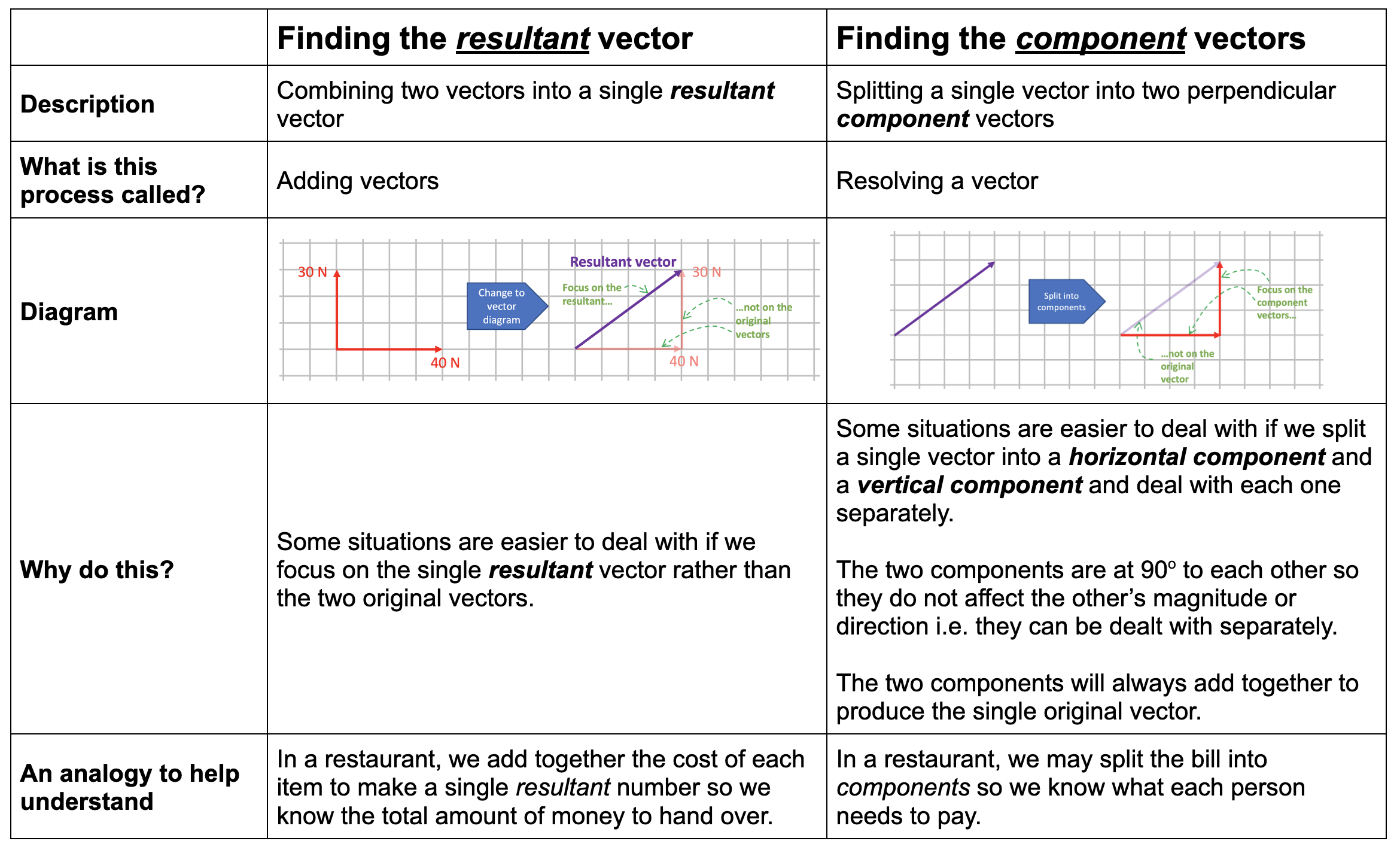
What is a component vector?
A component vector is one of at least two vectors that will combine to give one single original vector. The component vectors are chosen so that they are mutually perpendicular. Because of this, they cannot affect each other’s magnitude and direction and so can be dealt with separately and independently; that is to say, we can choose to consider what effect the vertical component will have on its own without having to worry about what effect the horizontal component will have.
Introducing components as ‘the vector less travelled by’
Two roads diverged in a wood, and I— I took the one less traveled by, And that has made all the difference. Robert Frost, 'The Road Less Travelled'
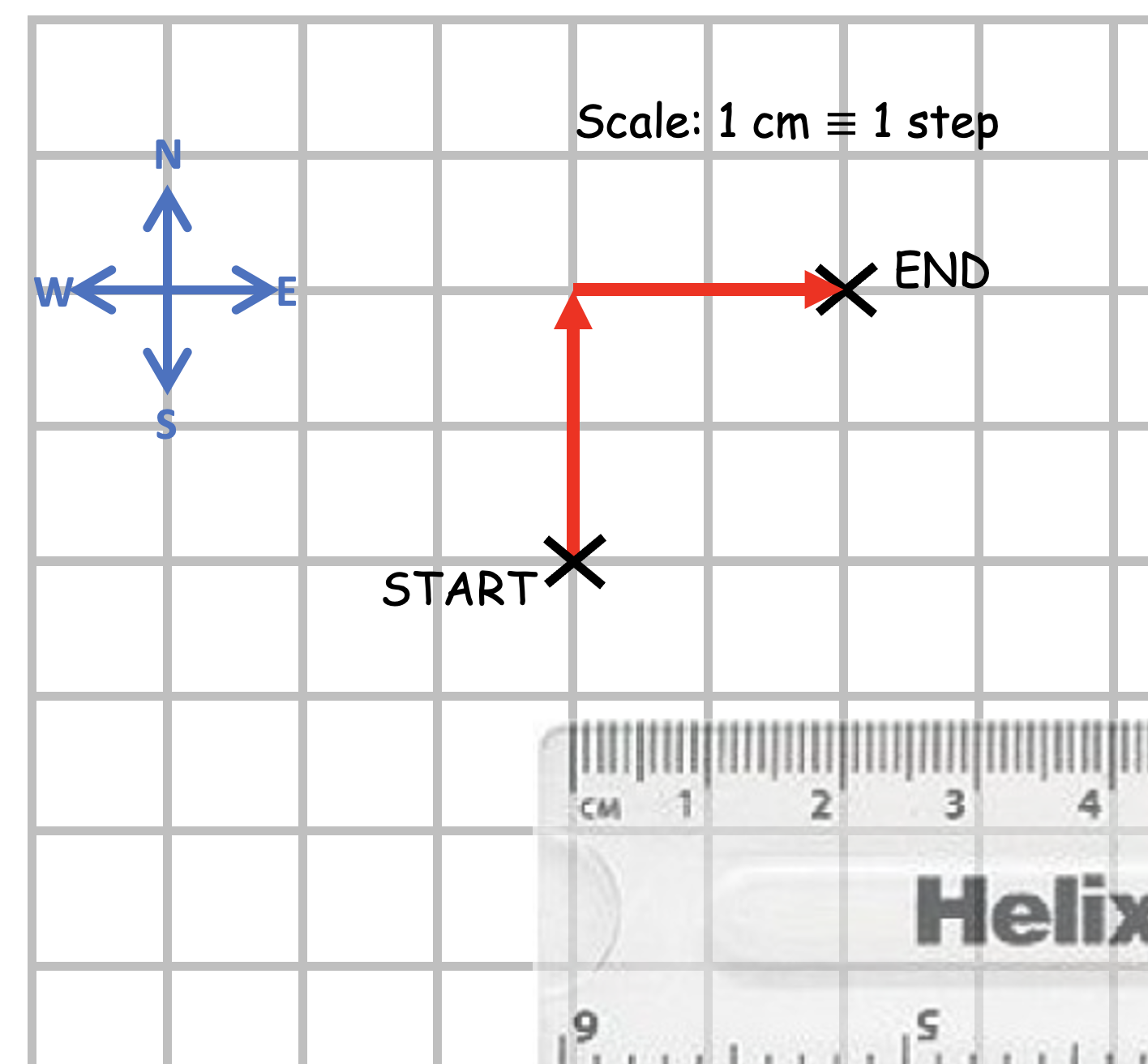
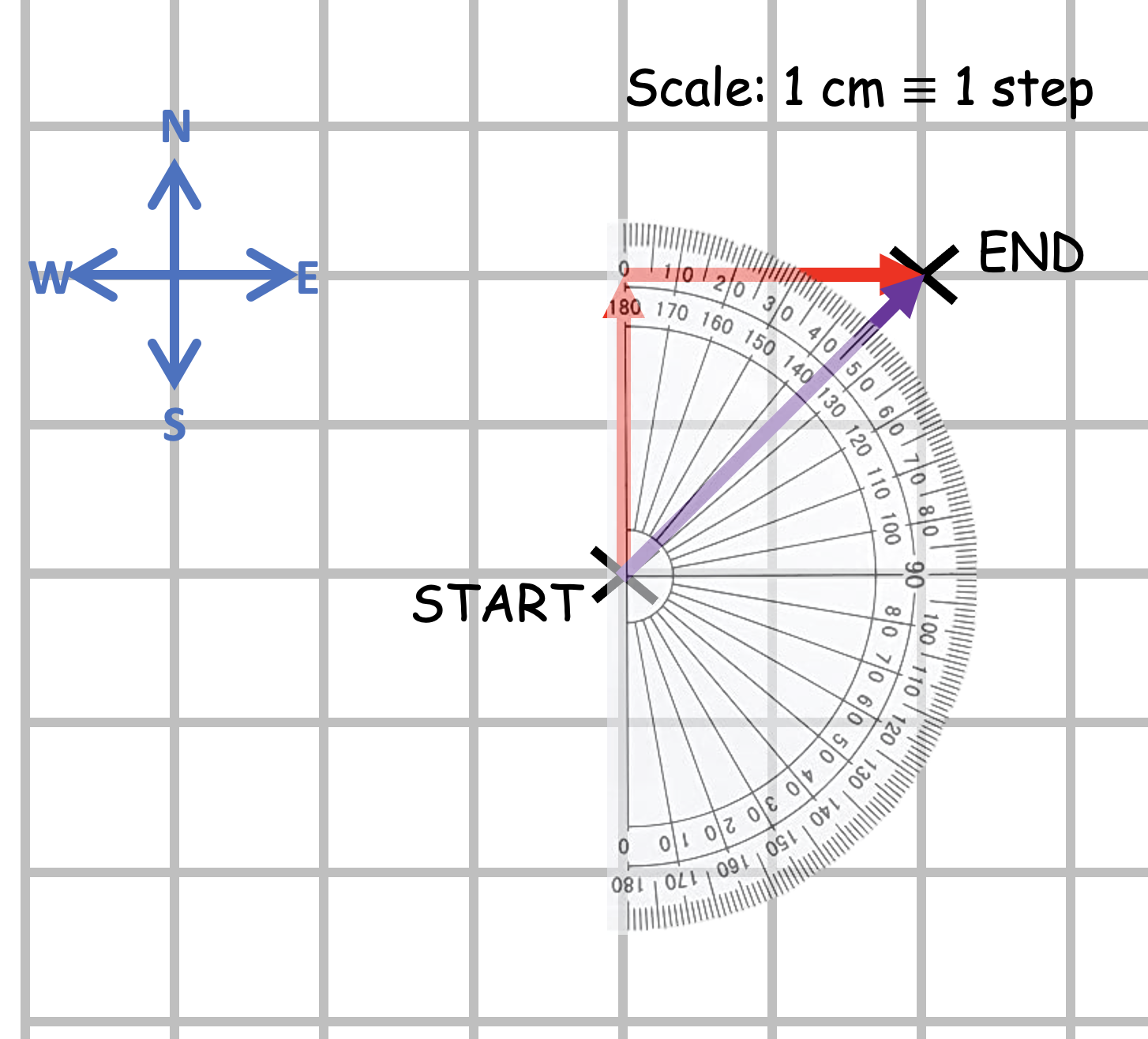
Let’s say we travelled a distance of 13 m from point O to point P on a compass bearing of 067 degrees (bear with me, I’m working with a slightly less familiar Pythagorean 3:4:5 triple here). This could be drawn as a scale diagram as shown below.
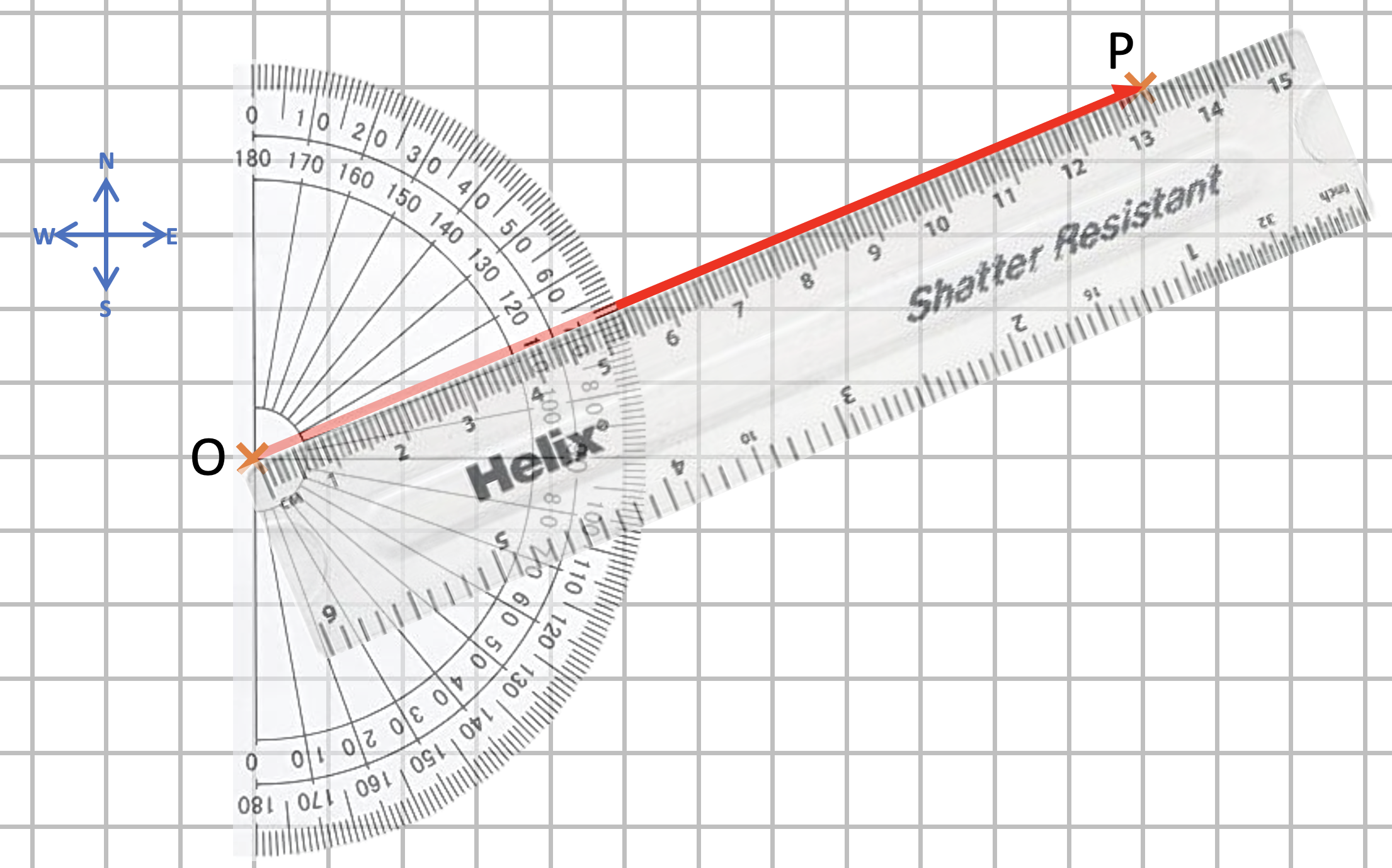
Could we analyse the displacement OP in terms of an eastward displacement and a northward displacement?

We can — as shown below.
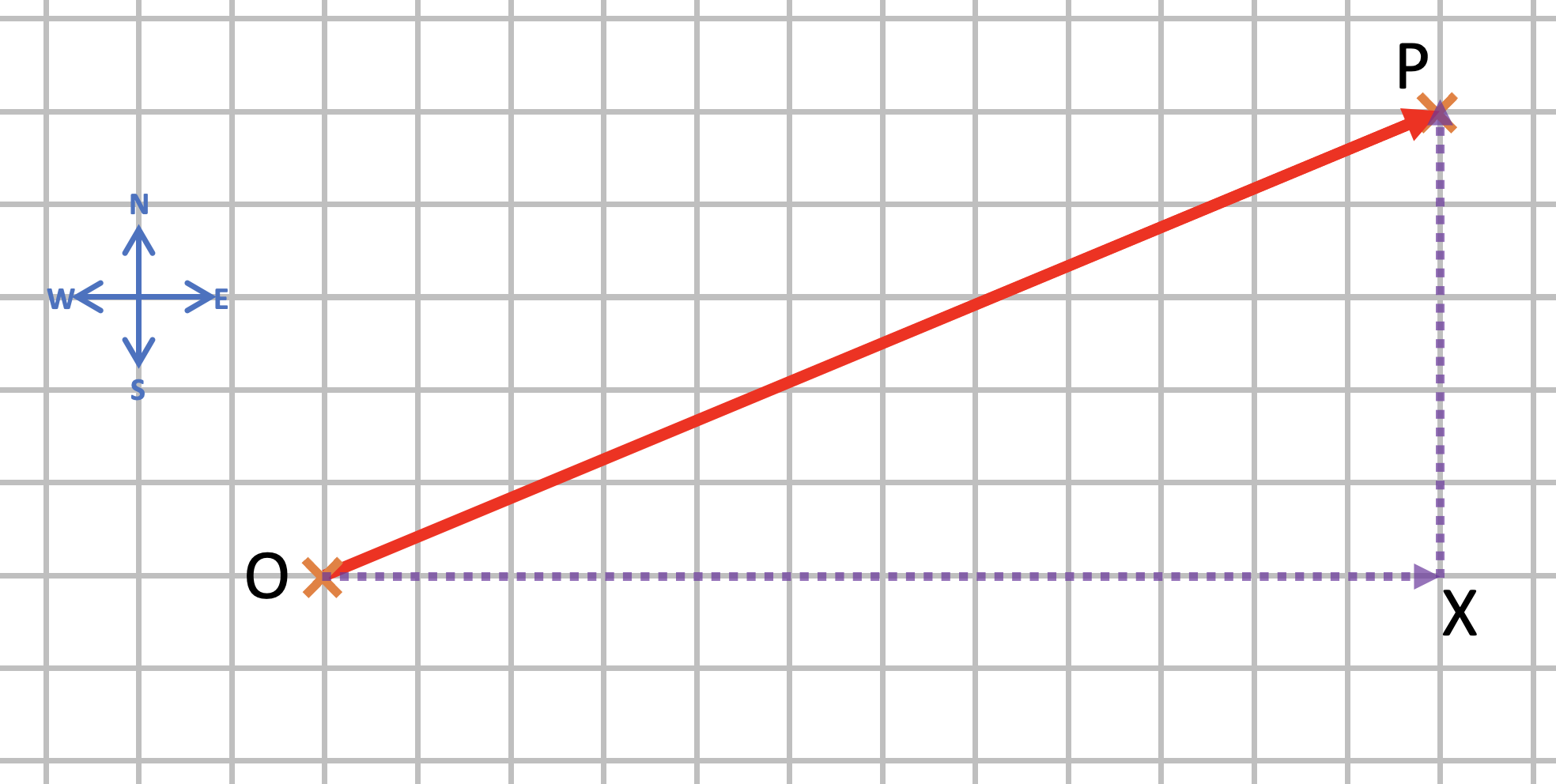
The dotted line OX is the eastward (horizontal on our diagram) component of the displacement OP. It is drawn as a dotted line because it is (literally) the ‘road less travelled’. We did not walk along that road — and that’s why it is drawn as a dotted line — but we could have done.
But let’s say that we had, and that we had stopped when we reached the point marked X. And then we look around, and strike out northwards and walk the (vertical) ‘road less travelled called XP — and we end up at P.
So walking one road less travelled might, indeed, make ‘all the difference’ — but walking two roads less travelled does not.
To rewrite Robert Frost: We took the two roads less travelled by / And that has made NO difference.
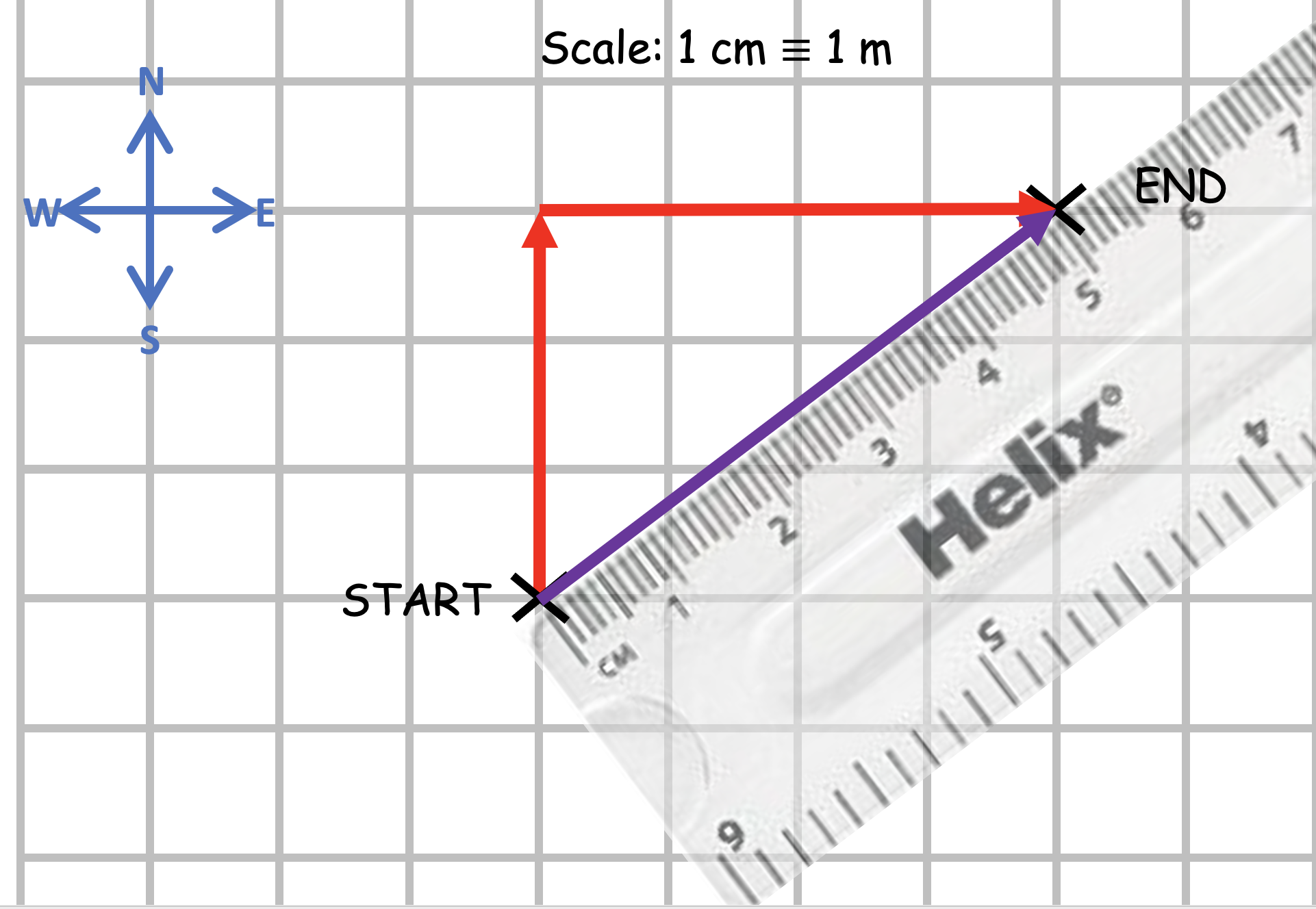
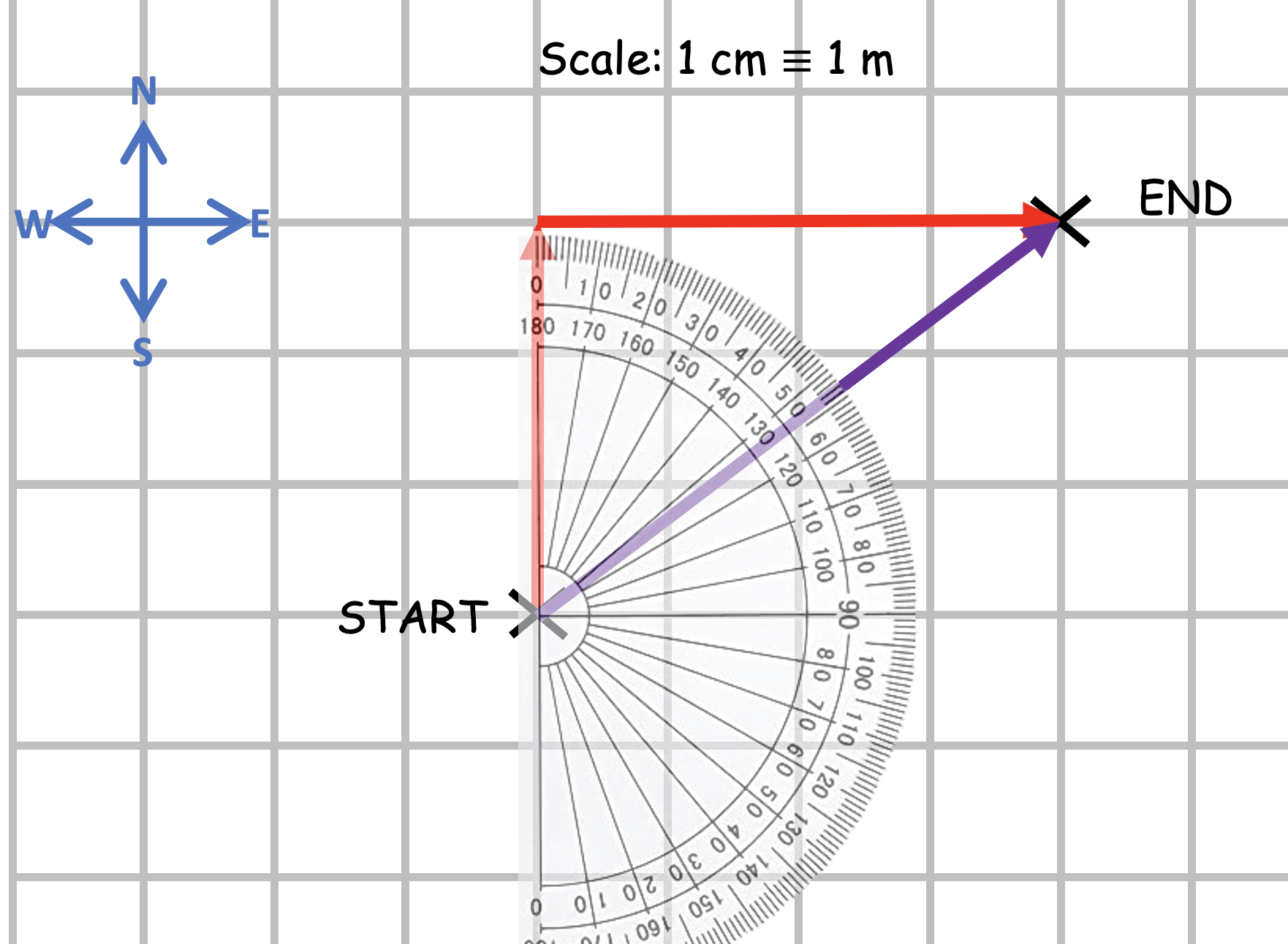
But why should we wish to go the ‘long way around’, even if we still end up at P? Because it would allow us to work out the change in longitude and latitude. By moving from O to P we change our longitude by 12 metres and our latitude by 5 metres. (Don’t believe me? Count the squares on the diagram!)
We have resolved the 13 metre distance into two components: one eastward (horizontal) component of 12 metres and one northward component of 5 metres.
Using resolving a vector into components to solve problems

We can use the scale drawing technique outlined above to resolve (‘split’) the 3000 N vector into a horizontal component and a vertical component.
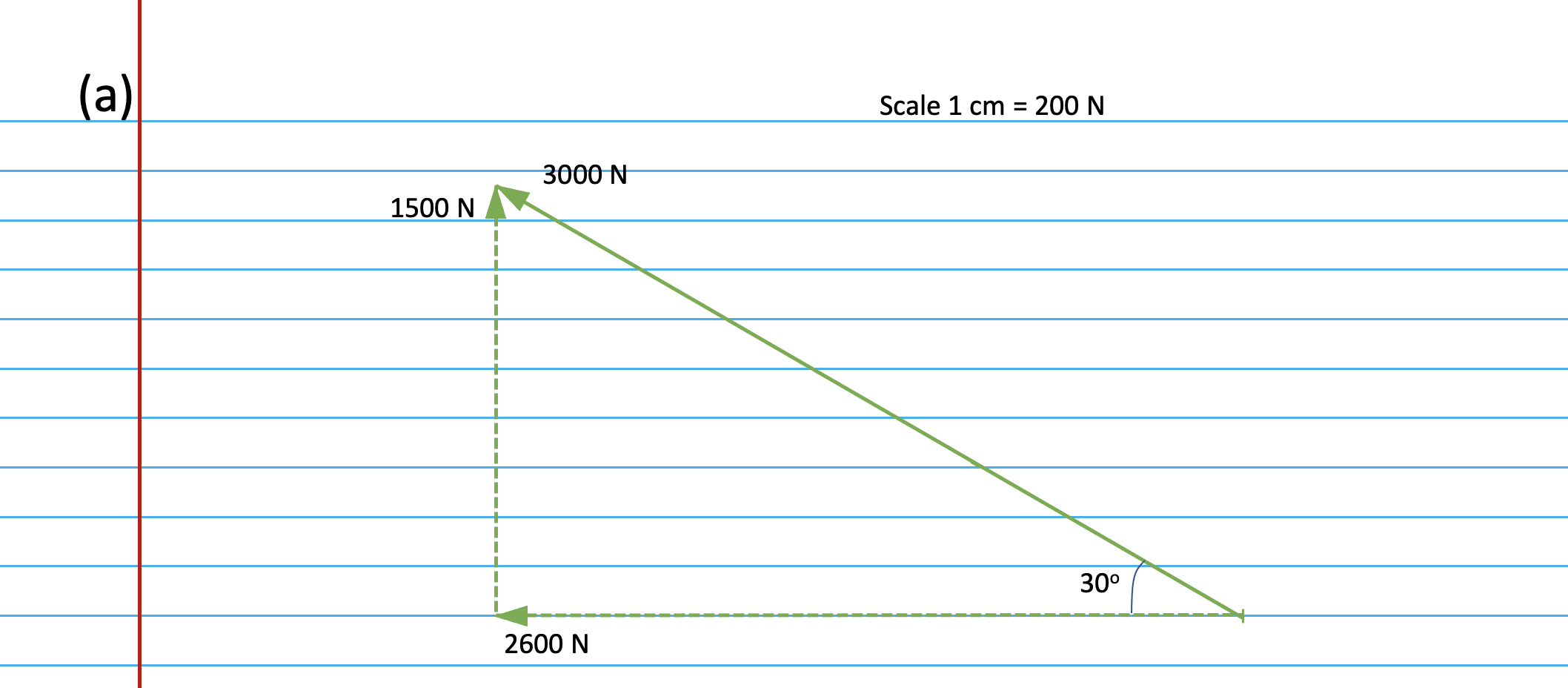
The full solution is shown in sequence on this PowerPoint.